
About

Doctoral Researcher | Robotics, Optimal Control, Reinforcement Learning
I am a first-year PhD student in Robotics and AI at the Department of Computer Science, University College London. Before joining UCL, I was a Robotics Research Engineer at EPFL, Switzerland, for my master's valorisation. I earned my Master of Research degree in Medical Robotics with Distinction from the Hamlyn Centre for Robotic Surgery at Imperial College London. I am grateful to be supported by Chiang Chen Foundation and Imperial College during my master's degree. Prior to Imperial, I spent my last year undergraduate at ETH Zürich, Switzerland, mainly for my bachelor's thesis. I obtained my Bachelor of Engineering degree in Automation from Harbin Institute of Technology, Harbin, China, in June 2023, with a semester abroad at KTH and a year abroad at ETH Zürich, and with the highest honor "Top Ten Outstanding Graduates of Harbin Institute of Technology".
- Institution: University College London
- E-mail: shengyang.zhuang.25 (AT) ucl.ac.uk
- Location: London, UK
- UCL Profile: CLICK HERE
- LinkedIn: CLICK HERE
- GitHub: CLICK HERE
- YouTube: CLICK HERE
Research Interest
My PhD research aims to understand cheetah through robotics. I am particularly interested in how cheetahs optimise stability, efficiency, and agility in their movement. To study this, I am exploring Inverse Reinforcement Learning (IRL) and Inverse Optimal Control (IOC) to uncover the principles underlying cheetah locomotion. I wish to translate these biological insights into the next generation of manoeuvrable quadrupedal intelligence with animal-level agility and naturalness. More broadly, I envision robotics as a scientific method to investigate animal biomechanics, bridging neuromechanics, control theory, and biorobotics to gain new insights into locomotor strategies in nature.
I am also interested in General Robotics for Lab Automation, building perception-driven systems that domain scientists can deploy across diverse tasks with minimal programming. My interests span one-step collision-free manipulation beyond waypoint-based control, end-effector co-design for versatile tool use, multi-arm collaboration, and mobile robots/ aerial platforms for automated sample transfer. I am also interested in deploying LLM for task-level robot control where natural language directly drives complex lab workflows . My AUTOHIAM project represents an initial trial toward this vision.
My general research interest is at the intersection of Robotics, Computer Vision, and Machine Learning. In the past, I developed robotic systems with applications in Lab Automation, Robot Manipulation, Life Sciences and Healthcare.
My motto is: if I am going to do something, I want to learn how to do it well. I might not become the best in the world at it, but I will learn how the people who are the best in the world are doing it.
I welcome opportunities for research collaboration and would be pleased to discuss potential projects—please feel free to get in touch :)
For UCL students: I am currently offering supervision for research projects in areas including cheetah 3D pose estimation, legged robot locomotion, and robotic manipulation for lab automation. Opportunities are available for research internships and Master’s thesis projects. Interested students are encouraged to contact me via email for further discussion.
News
- [16/04/2026] I gave a lecture to KS3 students on "Lasers, Robots, and Wild Animals" at UCL CS Flagship outreach event Rae Harbird Day.
- [14/04/2026] I gave a talk on "General Robotics for Lab Automation" at UCL Lab Automation Network.
- [28/05/2025] After a fruitful search of industry jobs & PhD positions in UK and China, I am excited to share that I will join the Department of Computer Science at University College London as a PhD student in October! I am grateful for the generous funding from MathWorks!
- [30/10/2024] Post-master update: I am happy to share that I will start my Master's Valorisation (post-graduation internship) as a Robotics Research Engineer at ALCHEMY, EPFL. I will work with Prof. Daryl Yee to develop a vision-based robotics lab assistant. Looking forward to reuniting with my friends in Switzerland again!
- [11/11/2024] I will be in Shanghai for ROSCon China 2024 from 7th - 8th December. I will also give a talk on the handeye_calibration_ros2 and hand_eye_calibration_ros2_sim, and other ros2 packages developed from my master's thesis. Feel free to drop by and chat about ROS!
- [15/10/2024] The Imperial College Board of Examiners have made decision to award me Master of Research with Distinction, following my completion of the academic year and consideration of my academic profile! (Click here to understand Imperial College grade classification)
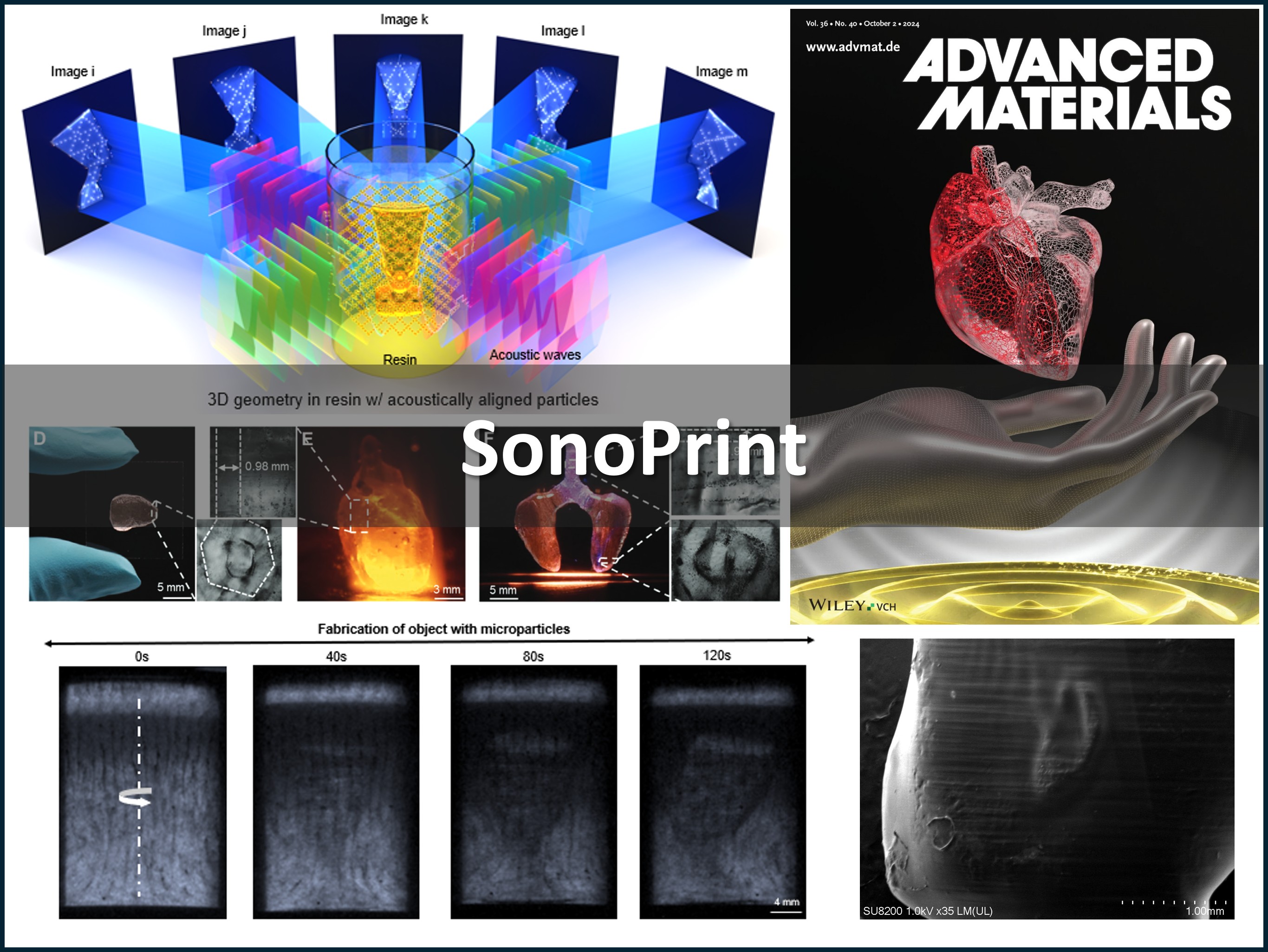
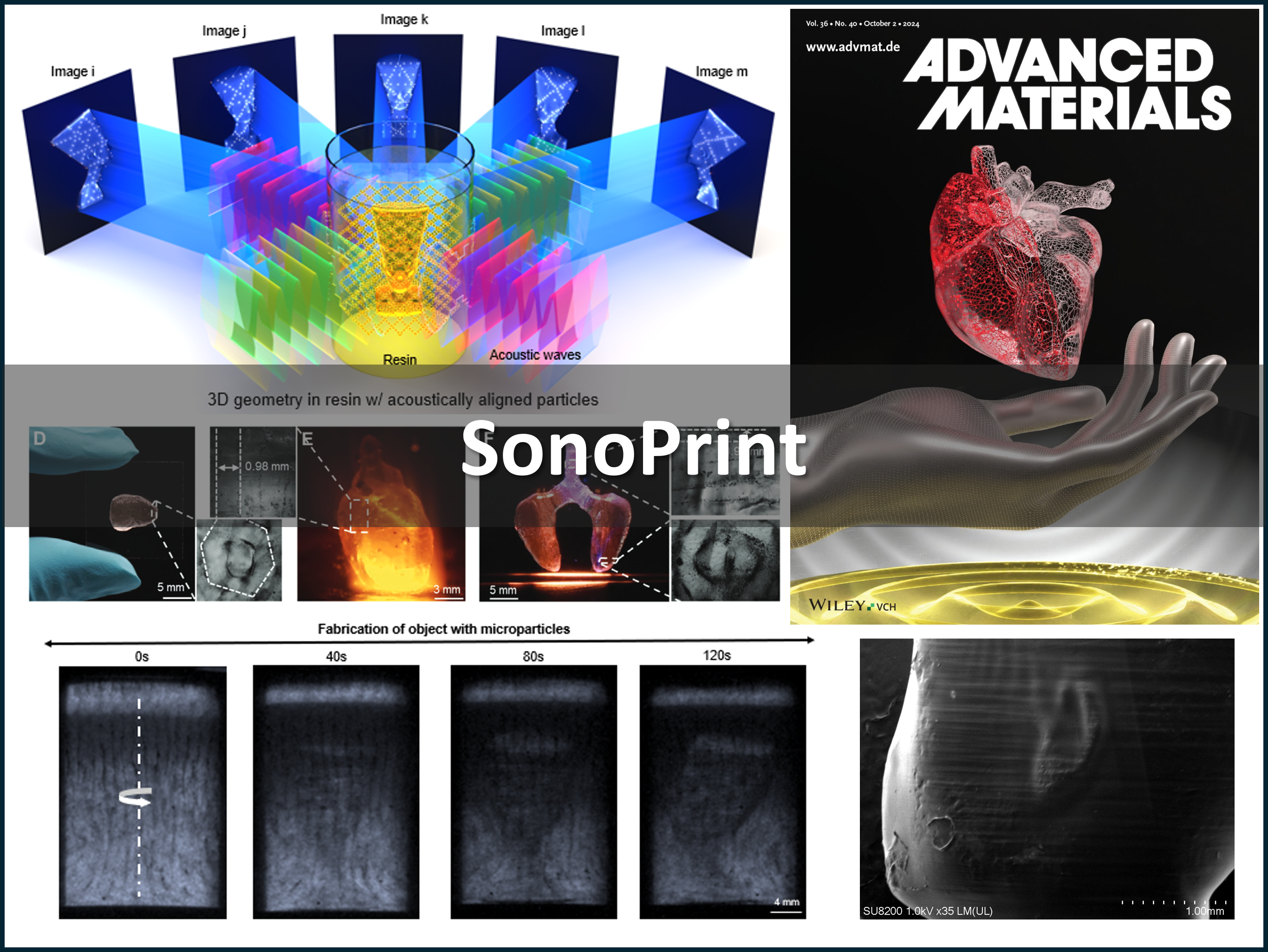
- [04/10/2024] Our work SonoPrint has been featured as the cover image in the Advanced Materials Journal!
- [11/09/2024] I am happy to share that I have passed my master's thesis viva. More information about my project can be found here.
- [25/07/2024] I am thrilled to announce that my bachelor's thesis paper has been officially published in Advanced Materials!
- [24/06/2024] I am selected for the "Cambridge Chinese Students and Scholars Association 2024 Homecoming Exchange Trip - Shanghai Station". I will be in Shanghai together with students from Cambridge University, ETH Zürich, and MIT from August 1st to 4th 2024.
- [31/05/2024] I will present a poster regarding the preliminary results of my MRes thesis "Multi-Robot System Prototyping for Cooperative Control in Robot-Assisted Spine Surgery" at The 16th Hamlyn Symposium on Medical Robotics, on 25th June, at Royal Geographical Society, London, UK. I look forward to many constructive research discussions!
- [29/05/2024] I will attend The Cambridge Ellis Unit Summer School on Probabilistic Machine Learning 2024, from 15th to 19th July, at University of Cambridge, Cambridge, UK!
- [03/05/2024] I will be in Chania, Crete, Greece from 8th to 10th June, for the AERO-TRAIN Summer School organized by Autonomous Systems Lab at ETH Zürich! Looking forward to meeting many amazing talented young researchers there!
- [02/01/2024] I joined the Mechatronics in Medicine (MiM) Lab for my eight-month MRes thesis supervised by Prof. Ferdinando Rodriguez y Baena. I would be closely working with Mr. Connor Daly and Dr. Hisham Iqbal on the perception and control of dual-arm spine robotics systems!
- [08/08/2023] My bachelor's thesis-related paper's preprint was now available at bioRxiv!
- [05/07/2023] I was selected as one of the 9 students in mainland China to be awarded the Chiang Chen Overseas Fellowship 2023/2024 ($50,000), which supports my full-time study at Imperial College London!
- [09/06/2023] I received a Bursary from the Hamlyn Centre, Imperial College which partially covered my living expense during my master study!
- [25/01/2023] I was offered a place in the Hamlyn Centre MRes in Medical Robotics and Image Guided Intervention at Imperial College London. Looking forward to my next academic journey in UK!
- [10/06/2022] I joined the Acoustic Robotics Systems Lab at ETH Zürich, Switzerland as an undergrad student researcher!
- [21/10/2021] I received the student exchange offer from KTH Royal Institute of Technology. I will be affiliated with the School of Electrical Engineering and Computer Science for a six-month study!
Curriculum Vitae
Click here to view my CV.
Education
University College London
Oct. 2025 -- present
London, UK
Doctor of Philosophy (Ph.D.) in Computer Science
Research topics: Understanding Cheetah Locomotion using Inverse
Reinforcement Learning.
Supervisor: Dr. Amir Patel and Prof. Dimitrios Kanoulas
Lab websites: Robotics-Enabled Biology Lab, and Robot Perception and Learning Lab.
Imperial College London
Sept. 2023 -- Nov. 2024
London, UK
Master of Research (M.Res.) in Medical Robotics
MRes thesis: "Multi-Robot System Prototyping for Cooperative Control in
Robot-assisted Spine Surgery", grade: Distinction
Supervisor: Prof. Ferdinando Rodriguez y Baena
ETH Zürich
Jun. 2022 -- Jun. 2023
Zürich, Switzerland
Invited visiting student in Mechanical Engineering
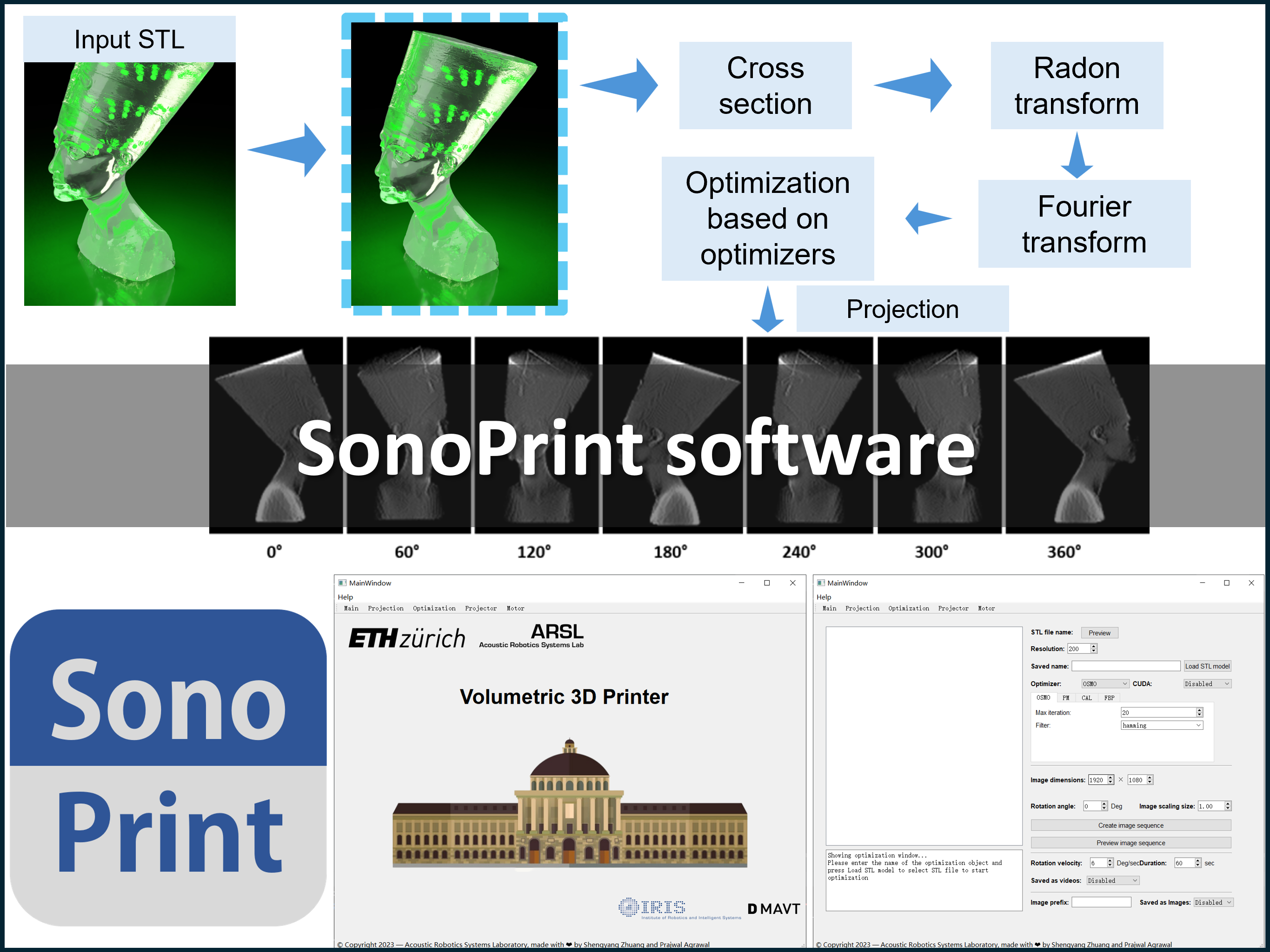
Bachelor's thesis: "Acoustically-Assisted Volumetric 3D Printing with
Feedback Optimization", grade 6.0/6.0
Supervisor: Prof. Daniel Ahmed
KTH Royal Institute of Technology
Jan. 2022 -- Jun. 2022
Stockholm, Sweden
Exchange student in Electrical Engineering and Computer Science
Harbin Institute of Technology
Aug. 2019 -- Jan. 2022
Harbin, China
Bachelor of Engineering (B.Eng.) in Automation
Supervisor: Prof. Huijun Gao
Xiamen No.1 High School of Fujian
Sept. 2016 -- Jun. 2019
Xiamen, China
High School Diploma
Work & Research Experience
École Polytechnique Fédérale de Lausanne (EPFL)
Feb. 2025 -- Jul. 2025
Neuchâtel, Switzerland
Robotics Research Engineer
Topics: Developed an AI & Robotics assistant for lab automation AUTOHIAM (funded by
EPFL enable).
Supervisor: Prof. Daryl Yee
The Hamlyn Centre for Robotic Surgery, Imperial College London
Oct. 2023 - Oct. 2024
London, UK
Research Assistant at Mechatronics in Medicine Lab (Jan. 2024 – Oct. 2024)
Research Assistant at Human-Centred Automation, Robotics and Monitoring in Surgery Lab (Imperial College St. Mary's Hospital) (Oct. 2023 – Dec. 2023)
Institute of Robotics and Intelligent Systems, ETH Zürich
Jun. 2022 -- Jun. 2023
Zürich, Switzerland
Research Assistant at Acoustic Robotics Systems Lab (Binnig and Rohrer Nanotechnology Center IBM Research Zürich & ETH Zürich)
School of Physics, Harbin Institute of Technology
Aug. 2021 -- Dec. 2021
Harbin, China
Teaching Assistant for the course "Mathematical Principles in College Physics"
Conferences, Summer Schools
- ROSCon China 2024, Shanghai, China, December 7th - 8th 2024 Gave a Lightning Talk on "ROS2 packages for plug-in-play hand-eye calibration, cuRobo GPU-accelerated motion planning, Marker-less object detection".
- Cambridge Ellis Unit Summer School on Probabilistic Machine Learning 2024, University of Cambridge, Cambridge, UK, July 15th - 19th 2024 Attended lectures on Gaussian process, Advanced probabilistic models, Reinforcement learning, Generative models, and Causal ML, etc.
- The 16th Hamlyn Symposium on Medical Robotics, Royal Geographical Society, London, UK, June 25th - 29th 2024 Presented a Poster title: "Multi-robot system prototyping for cooperative control in robot-assisted spine surgery".
- AERO-TRAIN summer school (Marie-Sklodowska-Curie Network), Chania, Crete, Greece, June 8th - 10th 2024 Attended lectures and exercises on aerial robot perception (motion planning, target detection); visual servoing control; teleoperation and haptics for human-robot interaction.
Selected Scholarships
- UCL Research Studentship, UCL
Department of Computer Science and The MathWorks, Inc., 06 2025
Awarded full international tuition fee and living stipend for four-year doctoral research at UCL and MathWorks. - Chiang Chen Overseas Fellowship 2023/2024, Chiang Chen
Industrial Charity Foundation and Hong Kong Chen Hsong Group, 07 2023
Awarded $50,000 for academic excellence (9 recipients nationwide) to fund full-time study at Imperial College. - Hamlyn Bursary, Hamlyn Centre and Institute of Global Health
Innovation at Imperial College, 06 2023
Awarded £3,000 to partially fund the living costs during master’s study. - Top Ten Outstanding Graduates [哈尔滨工业大学十佳大学生], Harbin
Institute of
Technology, 12 2021
Awarded ¥10,000 for top academic performance (10 recipients across Harbin, Shenzhen, and Weihai campuses).
Portfolio
Master's valorisation (at EPFL)
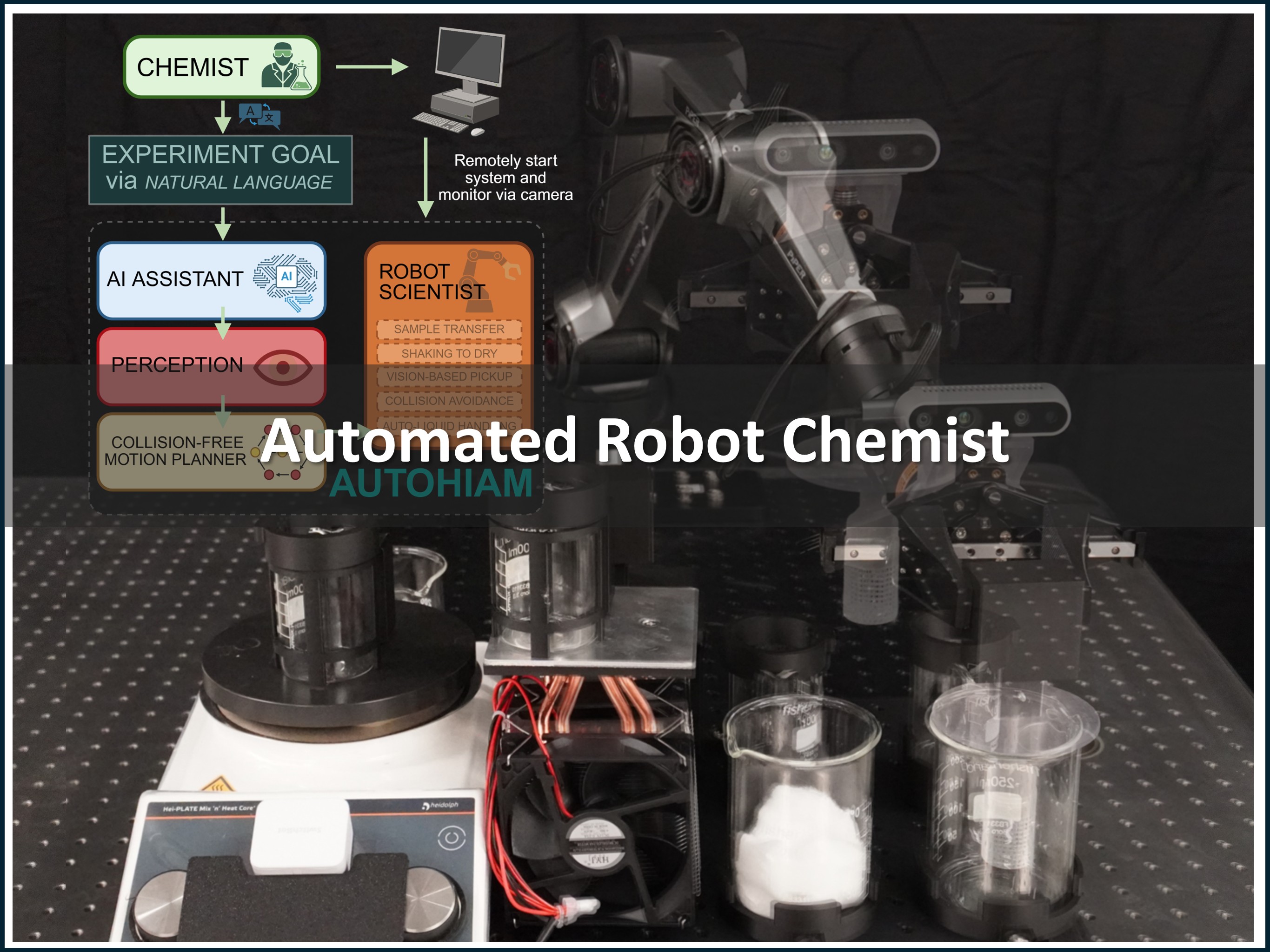
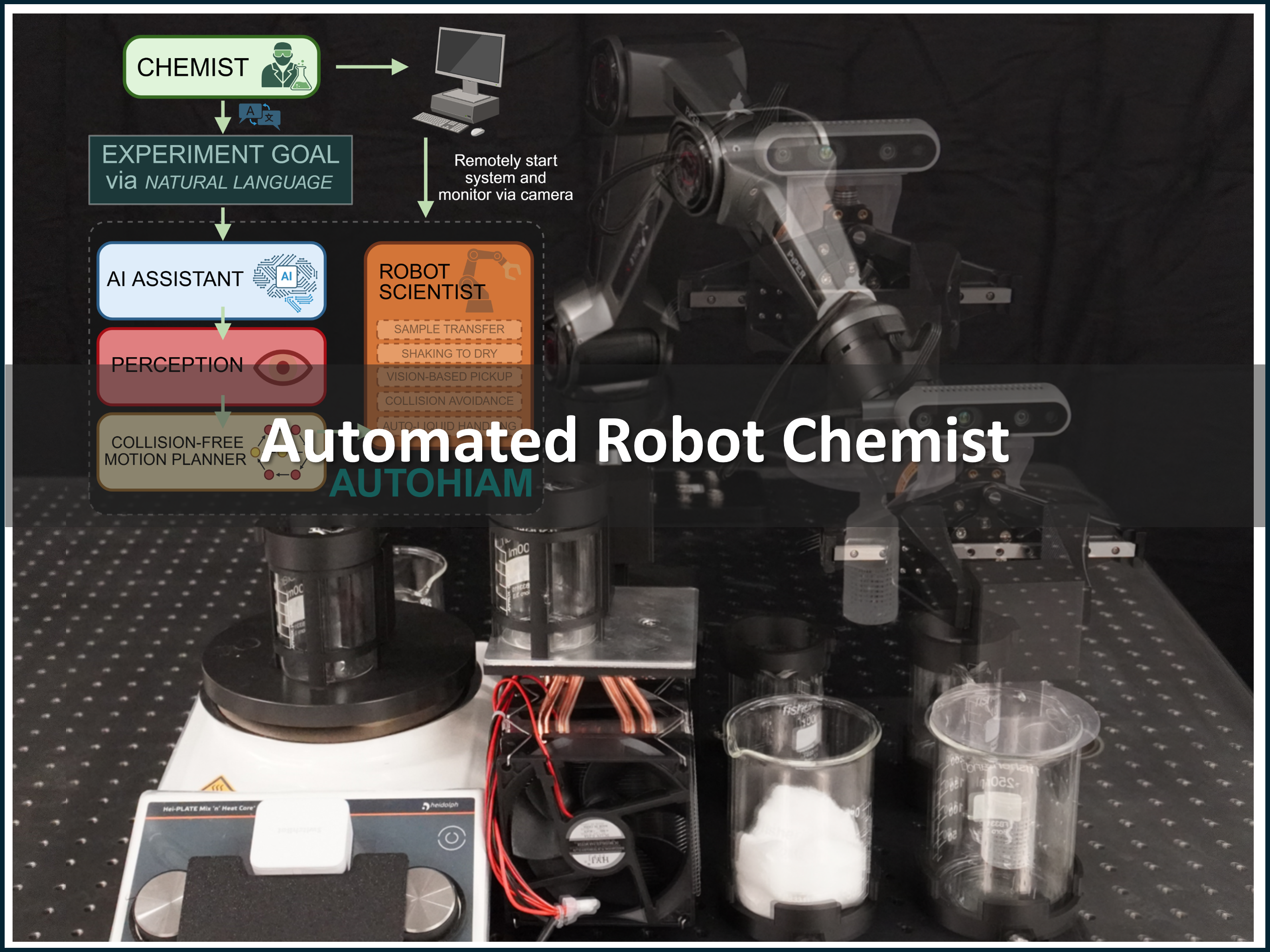
AUTOHIAM: Automated Robotic System for Hydrogel Infusion Additive Manufacturing
AUTOHIAM is an open-source robotic platform that automates the full HIAM workflow, enabling chemists to run multi-cycle, multi-sample experiments 24/7 without programming. It integrates vision-based pose estimation with ArUco markers and GPU-accelerated motion planning (cuRobo) for collision-free sample transfer, supports liquid handling with low-cost pumps, robot-assisted drying, and obstacle-aware planning. Chemists interact via natural language and monitor remotely. Validated on Gen2 metal-ceramic fabrication, AUTOHIAM delivers manual-quality samples with improved safety, scalability, and throughput.
Master's thesis (at Imperial)
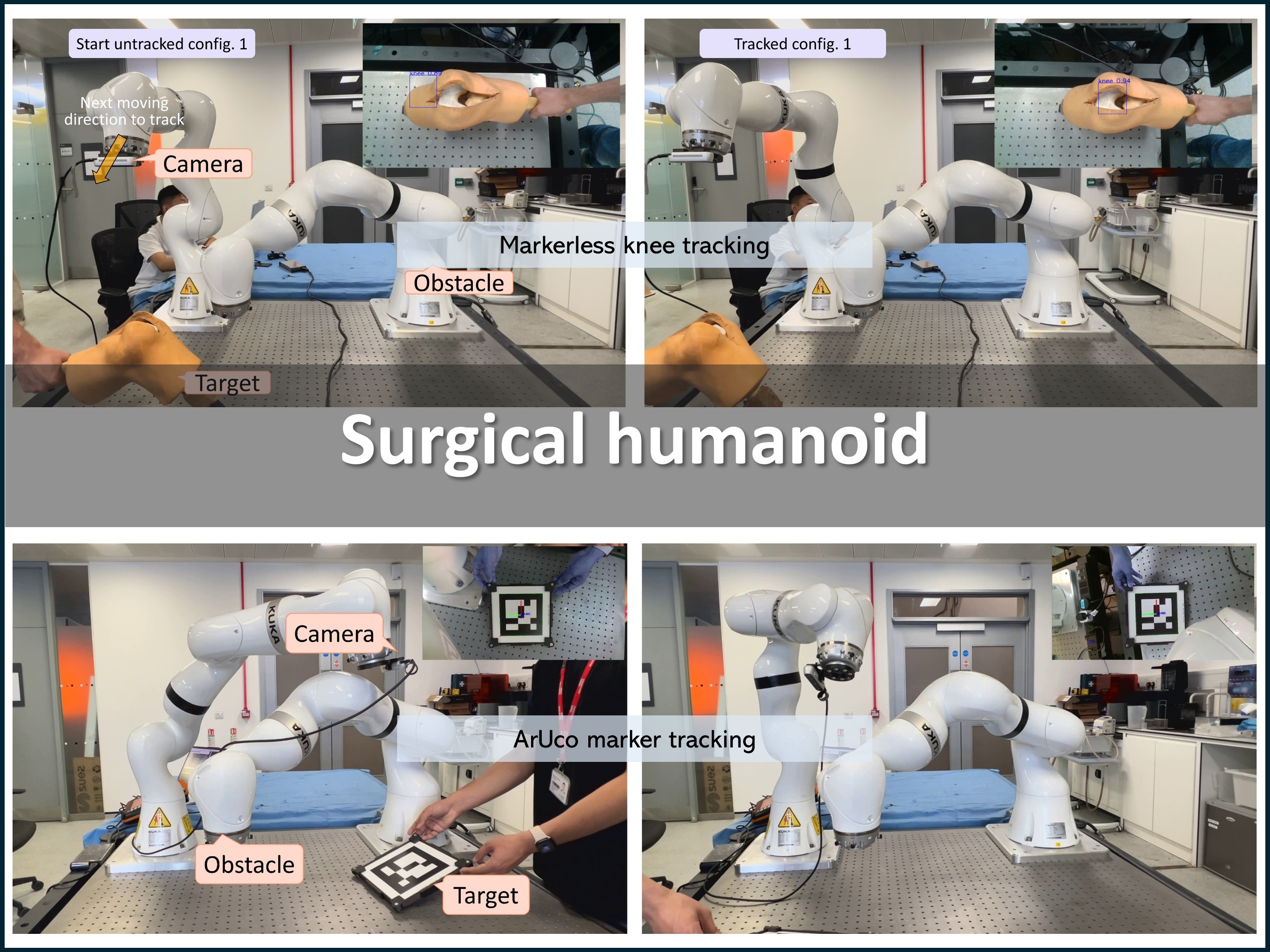
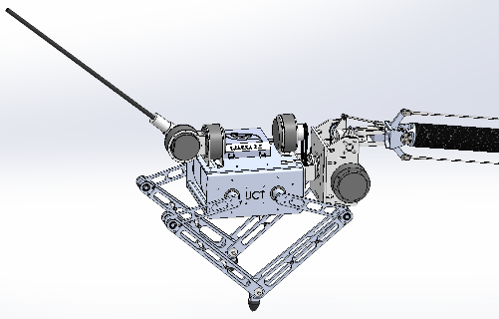
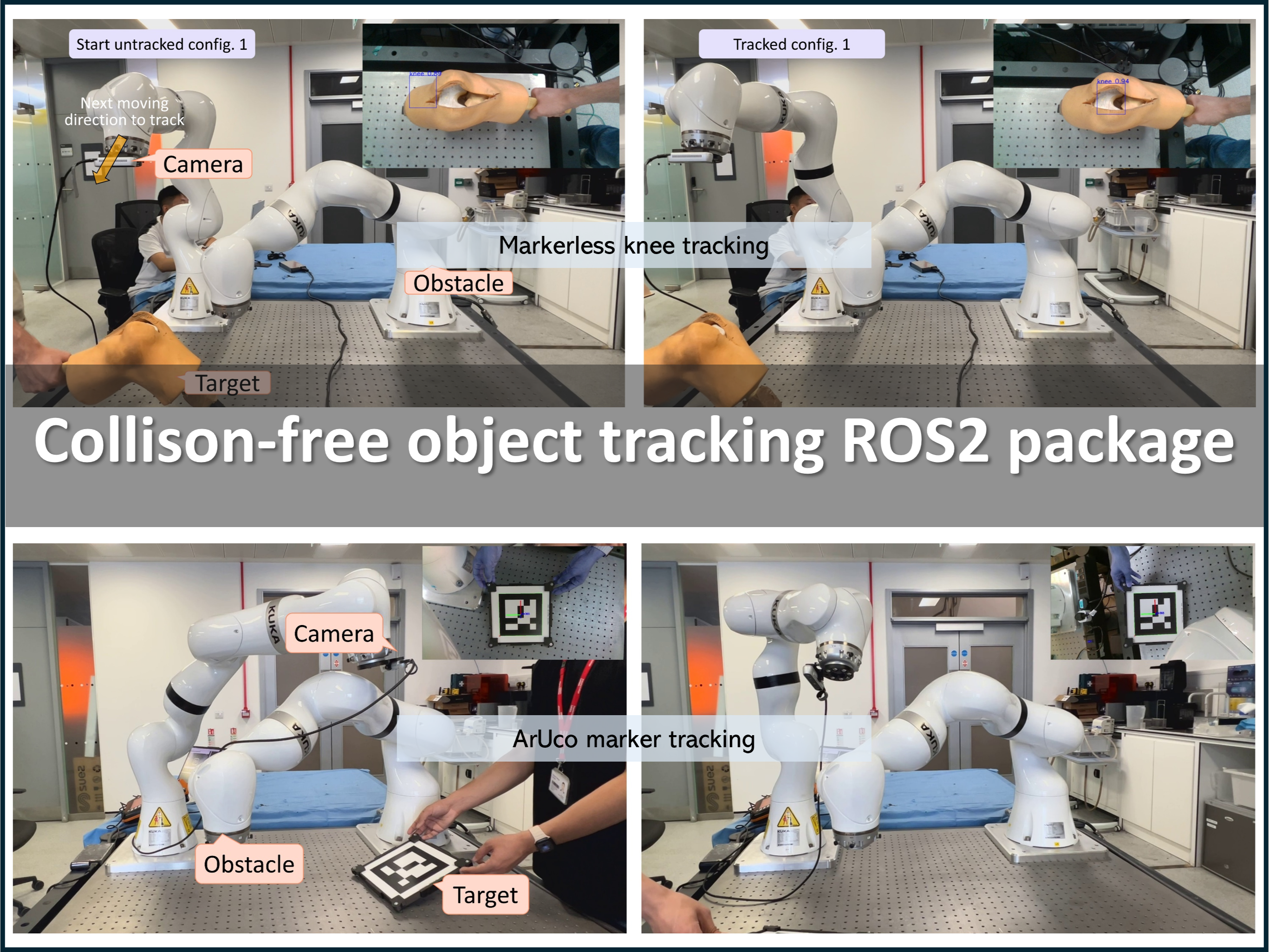
Multi-Robot System Prototyping for Cooperative Control in Robot-Assisted Spine Surgery
Object tracking in robot-assisted surgery has been clinically validated worldwide. However, optical marker is prone to light-of-sight blockage. A multi-robot cooperative system was developed, where one robot performed continuously tracking while avoiding collision with environmental obstacles and the second robot which performed surgery. We translated cuRobo, a GPU-accelerated motion planner, by integrating with LBR-stack ROS2 driver. A demo showcasing markerless knee tracking with collision avoidance was implemented.
Bachelor's thesis (at ETH)
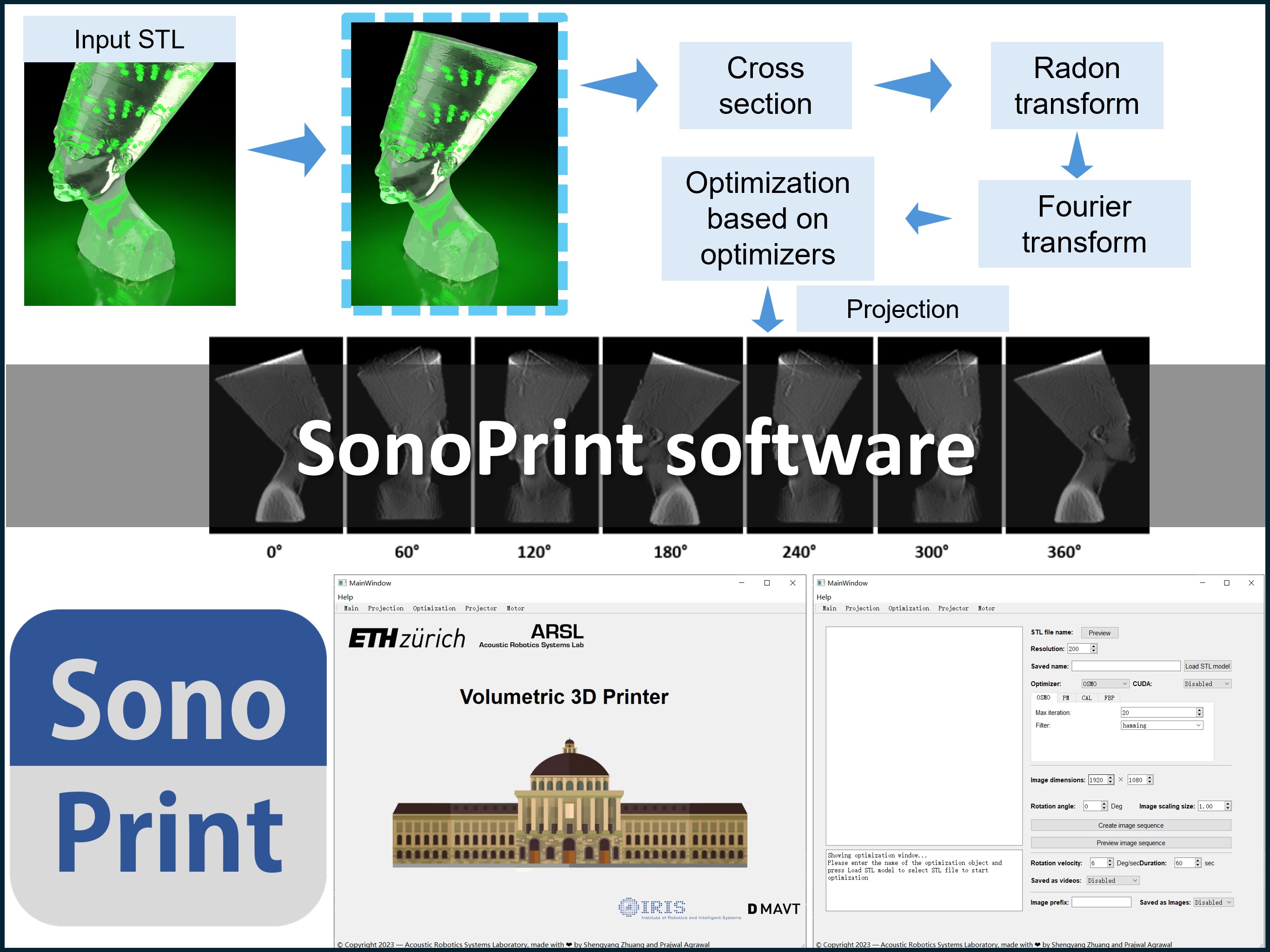
SonoPrint: Acoustically Assisted Volumetric 3D Printing with Feedback Optimization
SonoPrint is an innovative 3D printer that revolutionizes composite manufacturing by integrating acoustic reinforcement patterning directly into the printing process. It operates on the principle of volumetric printing, which reconstructs the entire 3D object simultaneously rather than layer by layer. It generates complex geometries with embedded reinforcement particles, such as glass, metal, and polystyrene (regardless of their size, shape or charge), within seconds to tens of seconds. It unlocks new possibilities in tissue engineering, biohybrid robots, and composite fabrication.
Semester project (at Imperial)
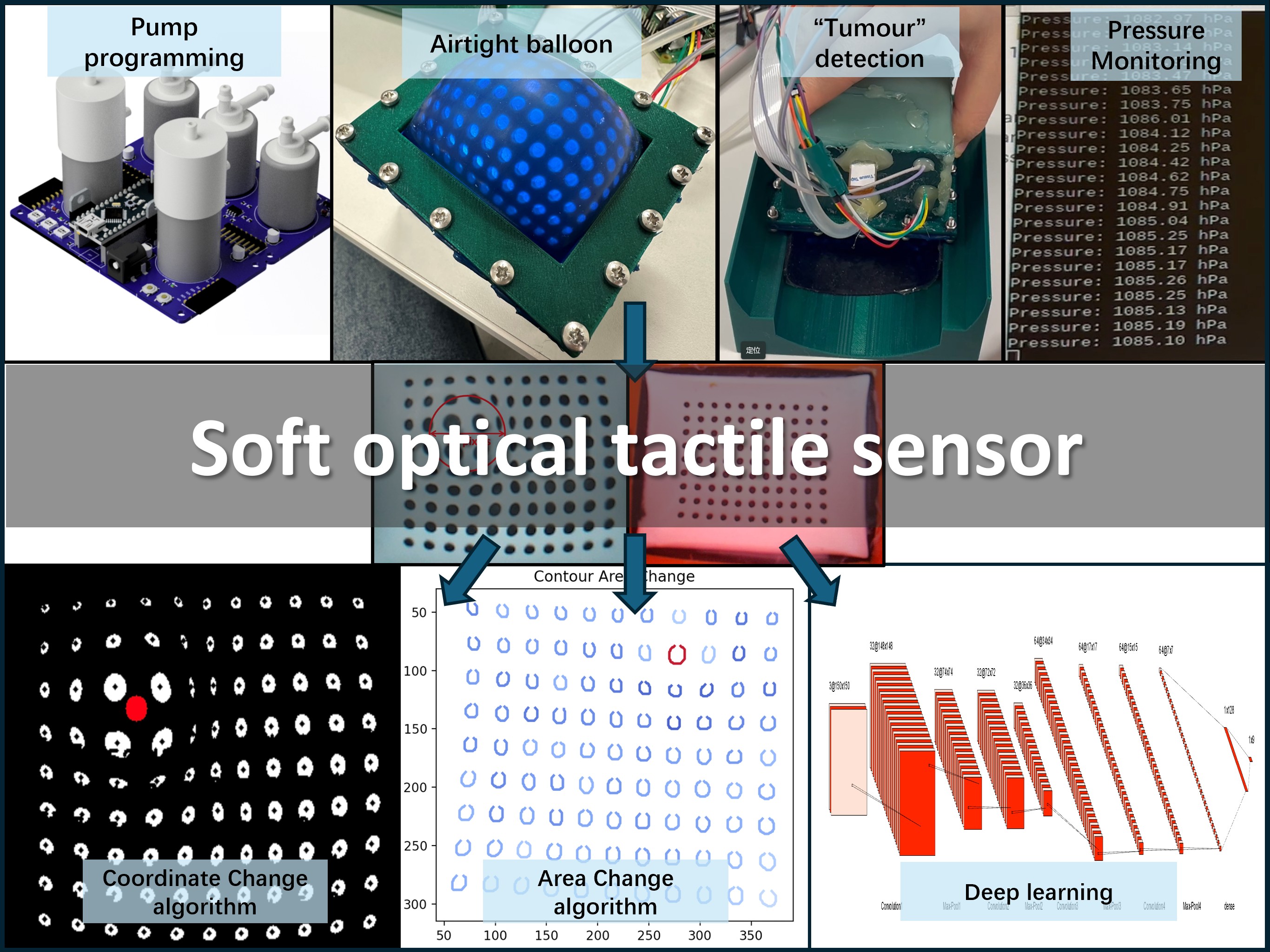
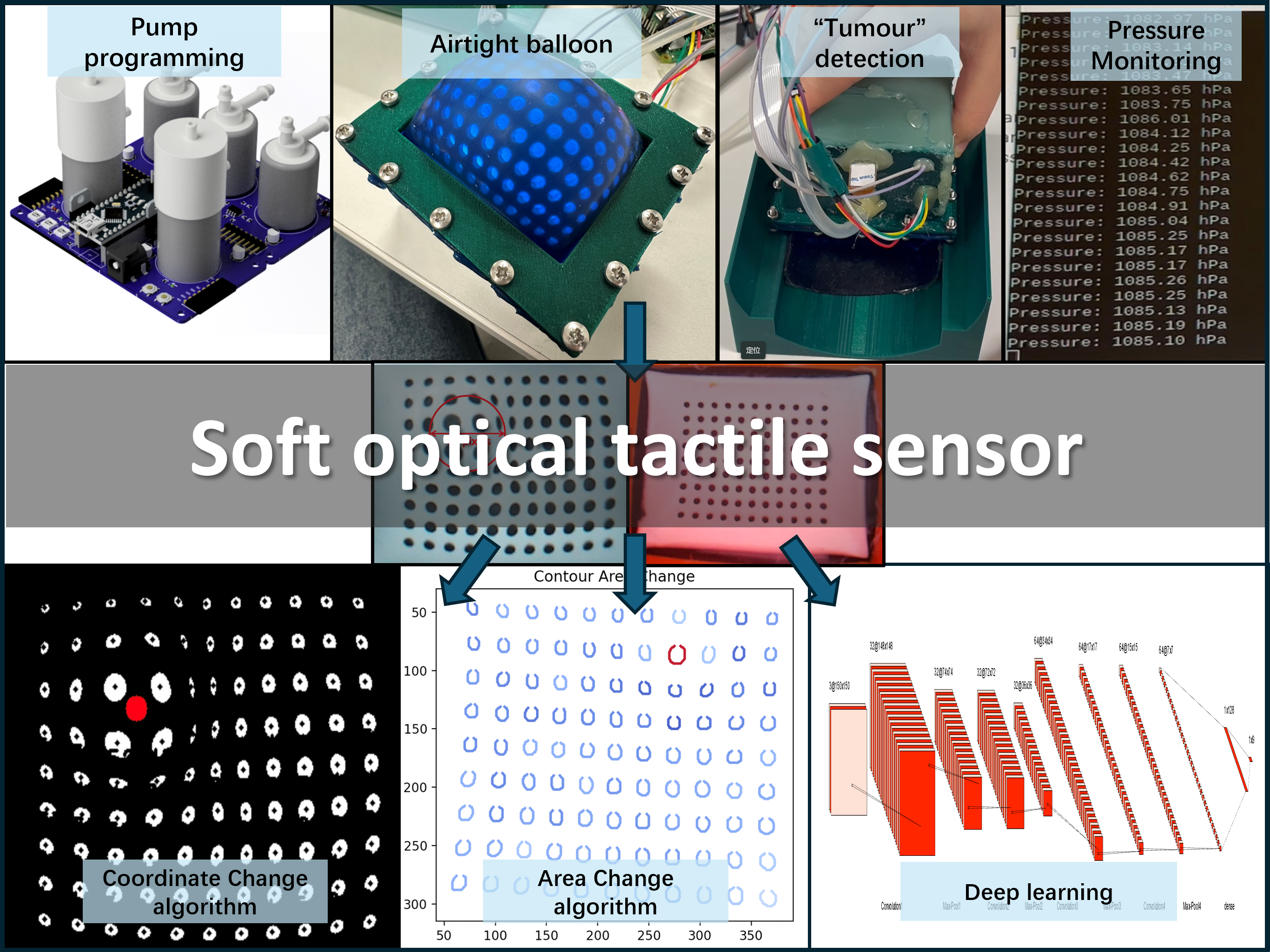
Soft Optical Tactile Sensor for Tumour Detection in Robotic Surgery
Robotic minimally invasive surgery has proven to enhance patient outcomes. However, there is a lack of tactile feedback which provides crucial information for surgery. Here we developed a soft optical tactile sensor to detect tumour size, hardness, and location beneath the skin. A replacable mechanical airtight structure was designed via CAD and PDMS molding. Two different computer vision algorithms were developed to identify changes of dot patterns. A CNN model was further trained to identify the results.
Related publications:
Video- All
- Robotics
- Machine Learning
- Computer Vision
- Others

Publications
Journal articles
Theses
Posters
Robotic Platforms
Robotic platforms I have hands-on experience with.
Half-Cheetah

KUKA iiwa 7

Piper (AgileX Robotics)
Miscellaneous
Media Coverage in Chinese/English
- 3D Printing Ultrastrong Materials, Tech Briefs, October 22, 2025
- Recipient of year 2023 Chiang Chen Exchange Scholarship,Chiang Chen Foundation
- “海联世界 相聚长宁”——2024欧美名校菁英长宁行活动举行,长宁统战,2024年8月2日
- Our "Say Hello to..." series features Shengyang this week!,ETH Zürich,February 3, 2023
- 榜样在身边 | 我院学生、集体在校级评奖评优活动中荣获多项荣誉, 哈尔滨工业大学航天学院,2021年11月30日
- 在科创中成长——访校级优秀团员、优秀团干部标兵庄昇洋, 哈尔滨工业大学航天学院,2021年6月4日
Photo Gallery

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}